UE PhysX BroadPhase
碰撞检测
Broad Phase介绍
Broad Phase是碰撞检测的第一步,基于物体的AABB进行碰撞检测,目标是快速剔除大部分不可能发生碰撞的物体对,只把可能重叠的候选对传给后续的Narrow Phase做精确检测。
PhysX的Speculative CCD即通过根据速度和时间步长膨胀AABB来避免高速漏检。
void FPhysScene_PhysX::InitPhysScene(const AWorldSettings* Settings)初始化PhysX场景,在这里对Broad
Phase进行配置。
PxBroadPhaseType::Enum physx::PxSceneDesc::broadPhaseType指定使用哪种算法,如果不指定,默认初始化为eSAP。
1 | |
eSAP 指Sweep And
Prune,通过对所有物体在坐标轴上的范围进行排序来检测重叠。初始化时采用基数排序,物体移动时采用插入排序。当大量物体处于静止时性能很好,内存开销低。当多数物体都在运动或频繁添加/删除时性能显著下降。
eMBP指Multi Box
Pruning,将世界划分为若干区域,每个区域单独进行基数排序,从而进行重叠检测。适用于移动物体较多的场景,在所有物体都移动或大量插入/删除时通常比eSAP更快。但需要预定义子划分数,设子划分数为N,区域数量为N*N(在水平面上做二维划分),过大会影响性能和内存;当很多物体静止时不如eSAP。
eGPU依赖GPU硬件加速实现,需要硬件支持SM3.0或更新标准。
如何配置MBP
SAP不需要特别配置,MBP则需要配置。
Project Settings窗口的默认Broadphase配置全局生效,World Settings窗口的Broadphase配置可以覆盖默认配置,只对当前关卡生效。
可配置项对应AWorldSettings的FBroadphaseSettings AWorldSettings::BroadphaseSettings的成员变量。
Use MBPOn Client — 对应bUseMBPOnClient
Use MBPOn Server — 对应bUseMBPOnServer
Use MBPOuter Bounds — 对应bUseMBPOuterBounds,选择是否设置MBPOuter Bounds
MBPBounds:
Min (X, Y, Z) — 对应MBPBounds.Min
Max (X, Y, Z) — 对应MBPBounds.Max
MBPOuter Bounds:
Min (X, Y, Z) — 对应MBPOuterBounds.Min
Max (X, Y, Z) — 对应MBPOuterBounds.Max
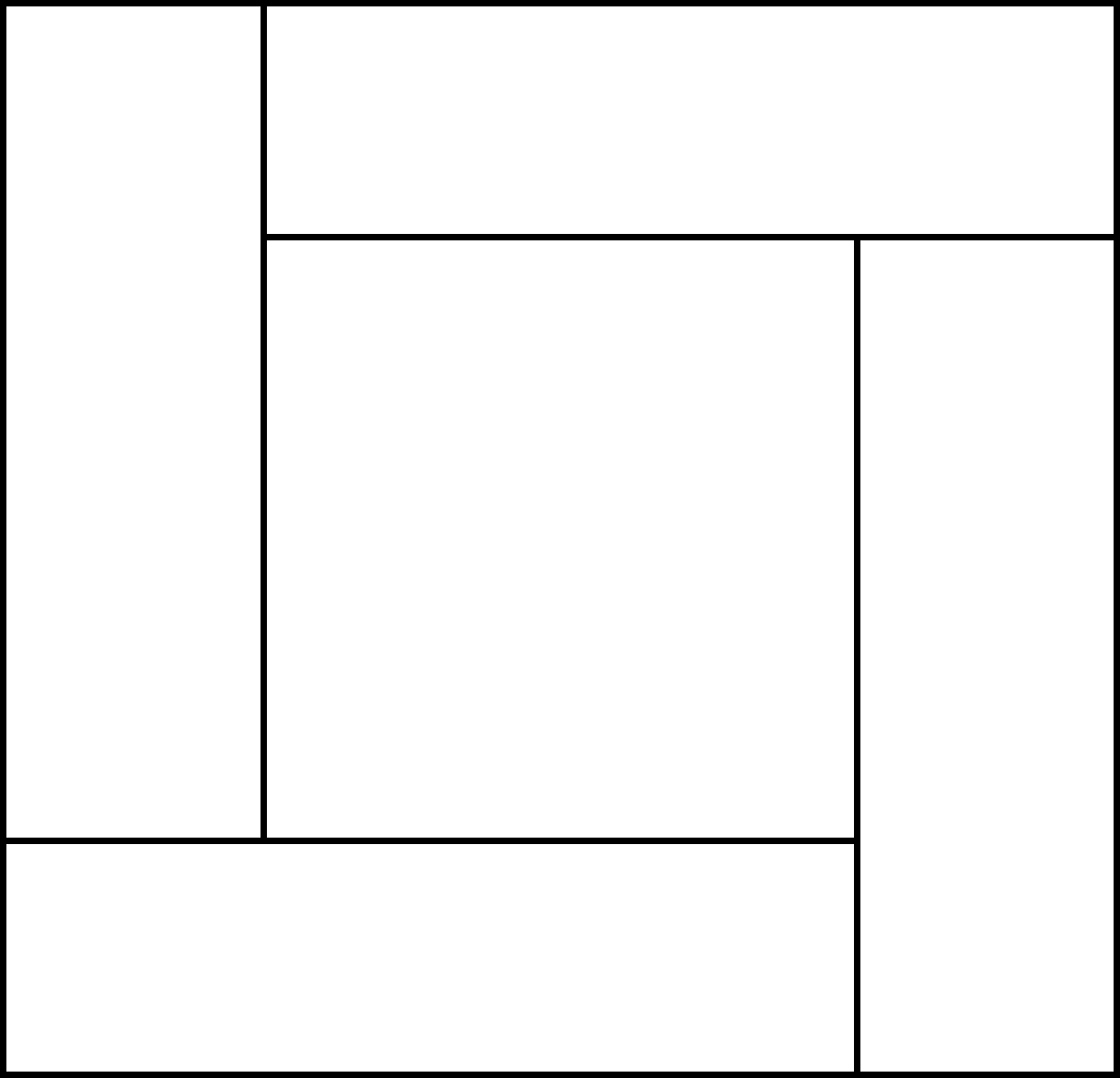
MBPBounds和MBPOuter Bounds之间会创建四个区域,如图示:
(PhysX只提供了添加区域的接口,是UE自己设计的)
MBPNum Subdivs — 对应MBPNumSubdiv,即划分数。
在控制台配置:
p.ForceMbpClient:强制在客户端场景使用MBP。
p.ForceMbpServer:强制在服务器场景使用MBP。
p.OverrideMbpNumSubdivisionsClient:覆盖客户端MBP子划分数(非 0 才生效)。
p.OverrideMbpNumSubdivisionsServer:覆盖服务器MBP子划分数(同上)。
(这些CVar只在场景创建时生效,运行时修改需要重建/重新创建场景才能应用)
(p.ForceMbpClient和p.ForceMbpServer没有作用)
算法流程
PhysX将工作拆分为Task,每个Task对应一个函数,入参为下一个Task。通过定义这些Task之间的先后依赖关系,由线程池中的空闲线程去动态执行。
Sc::Scene::rigidBodyNarrowPhase内创建Task链条:
mBroadPhase -> mPostBroadPhase ->
mPostBroadPhase2 -> mPostBroadPhase3 ->
*continuation。*continuation为rigidBodyNarrowPhase函数入参,由其调用者传入,即TaskmRigidBodyNarrowPhase执行完后的下一个Task。
mBroadPhase、mPostBroadPhase、mPostBroadPhase2、mPostBroadPhase3均为由Cm::DelegateTask绑定到指定函数的Task。
mBroadPhase对应函数Sc::Scene::broadPhase,执行Board
Phase碰撞检测。它调用
mAABBManager->updateAABBsAndBP,更新所有动态物体的
AABB(轴对齐包围盒),并将这些变化传递给底层的Board
Phase算法(SAP或MBP),从而计算出新产生的重叠对和消失的重叠对。
updateAABBsAndBP处理AABB更新后调用finalizeUpdate,finalizeUpdate调用mBroadPhase->update(const PxU32 numCpuTasks, PxcScratchAllocator* scratchAllocator, const BroadPhaseUpdateData& updateData, physx::PxBaseTask* continuation, physx::PxBaseTask* narrowPhaseUnblockTask)(BroadPhase& mBroadPhase是BroadPhaseSap或BroadPhaseMBP实例)。在使用MBP的情况下,在其中创建Task链条:
mMBPUpdateWorkTask->mMBPPostUpdateWorkTask->*continuation,mMBPUpdateWorkTask、mMBPPostUpdateWorkTask均为由Cm::Task继承而来的Task,分别调用函数update,postUpdate(入参均为PxBaseTask*),对应Unreal Insights中的性能统计项BpMBP.updateWork、BpMBP.postUpdateWork。使用SAP同上。
mPostBroadPhase对应函数Sc::Scene::postBroadPhase,通知Narrow
Phase上下文Board
Phase已完成,调用mAABBManager->postBroadPhase获取并处理Board
Phase产生的重叠对结果,清理已改变的 AABB 管理器句柄映射,调用
finishBroadPhase开始创建新的交互对象(Interactions)和接触管理器(Contact
Managers)。
mPostBroadPhase2对应函数:Sc::Scene::postBroadPhaseStage2,处理因失去接触而需要唤醒的物体,释放预分配的接触管理器和形状交互对象的内存回池。
PhysX 使用“岛屿”来分组相互作用的物体。如果一个岛屿中的所有物体都静止不动且能量低于阈值,整个岛屿会进入睡眠状态以节省 CPU/GPU 计算资源。
例如,一开始物体A和B相互堆叠,A在B的下面,都静止并进入睡眠状态(属于同一个睡眠岛屿)。随后,A受到了一个瞬时力,导致A醒来并开始移动,A与B失去接触。
此时如果不唤醒B,B仍然认为自己是睡眠岛屿的一部分。但在下一帧,由于A已经移开,B本应因为重力开始下落,却没有下落,导致bug。
因此,必须唤醒B,以便在下一帧重新计算其受力情况和运动状态。
mPostBroadPhase3对应函数
Sc::Scene::postBroadPhaseStage3,调用finishBroadPhaseStage2
完成最后的清理工作。
SAP
BroadPhaseSap::update调用batchRemove移除所有待移除的对象,分别在三个轴上更新排序。更新时只处理移动过的对象,采用插入排序。在三个轴上都重叠的AABB即重叠。
BroadPhaseSap::postUpdate收集新增和消失的重叠对。
MBP
PhysX提供了添加区域的接口createRegionsFromWorldBounds、addBroadPhaseRegion,UE在FPhysScene_PhysX::InitPhysScene函数内根据用户配置的边界和子划分数生成区域。
PhysX定义最大区域数量为256,#define MAX_NB_MBP 256,因此,UE对配置的NumSubdivisions(默认为2)clamp到1到16,用于将MBPBounds划分为区域。在bUseMBPOuterBounds为true的情况下,NumSubdivisions最高仅为15,因为在MBPBounds和MBPOuterBounds之间会生成四个区域作为Outer区域。
1 | |
BroadPhaseMBP::update(仅在多线程模式下有操作,否则在setUpdateData中同步完成碰撞检测)调用mMBP->findOverlapsMT(mGroups)遍历所有区域,调用每个区域内部的重叠检测。在此之前,Region::prepareOverlapsMT已经对静态/动态物体按X轴最小值进行基数排序。findOverlapsMT使用doCompleteBoxPruning检测动态-动态对和动态-睡眠动态对是否重叠,doBipartiteBoxPruing检测动态-静态对是否重叠。
BroadPhaseMBP::postUpdate重置每个区域的"已更新"计数器,调用finalize收集新增、持续、消失的重叠对。
算法分析
基于 NVIDIA PhysX 3.4 源码(
Engine/Source/ThirdParty/PhysX3/PhysX_3.4/Source/LowLevelAABB/)的实现分析。
1. 总体设计对比
| 维度 | SAP(BroadPhaseSap) |
MBP(BroadPhaseMBP / MBP /
Region) |
|---|---|---|
| 核心思想 | 对 3 个轴各自维护一份按浮点值排序的端点表(min/max),在帧间通过冒泡式增量插入保持有序,并在端点 swap 时维护活跃 pair 集合 | 把世界切成若干 Region,每个 Region
内部独立执行一次"主轴排序 + Sweep(Complete/Bipartite Box Pruning)",跨
Region 由对象同时归属多个 Region 来覆盖 |
| 是否需要世界边界 | 否,无限世界 | 是,必须由用户通过 addRegion 注册
region,未覆盖区域的对象会进入"out-of-bounds" 列表(见
MBP::addToOutOfBoundsArray) |
| 排序粒度 | 全局 3 个轴端点链表(共 2N + 2 个
sentinel-保护的元素) |
区域内的"主轴 minX" 单轴排序(基数排序 RadixSort) |
| 帧间状态 | 强增量 —— 上一帧 pair 列表直接保留,本帧只处理 swap 引发的 add/remove | 半增量 —— Pair 列表保留并通过
isNew/isUpdated 标记,几何上每帧重新做 box pruning |
| 数据结构 | 端点数组 + 双向链表(mListPrev/mListNext)+ 活跃区间
BroadPhaseActivityPocket |
MBPEntry 表 + mStaticBoxes/mDynamicBoxes
SoA-like 数组 + Radix sort 缓冲 |
| Pair 容器 | SapPairManager(开放寻址 hash 表 + 状态位
PAIR_INARRAY/PAIR_REMOVED/PAIR_NEW) |
MBP_PairManager(开放寻址 hash 表 +
isNew/isUpdated 标志) |
| AABB 编码 | 32-bit ValType,将 float 通过 encodeFloat
编码成可整数比较的值,min 偶数对齐 / max 奇数对齐 |
同样使用 encodeFloat,但右移 1
位(>>1)以保留 31 位精度同时让 min/max
区分;可选启用 MBP_SIMD_OVERLAP 的
SIMD_AABB(XMXMYZ 布局) |
| 静态 vs 动态 | 不区分(所有对象都在统一的 3 轴端点表里),通过
mBoxGroups 过滤 |
显式区分:每个 Region 维护
mStaticBoxes +
mDynamicBoxes,静态盒子可以做"延迟一次性排序"(staticSort) |
| 并行性 | 3
个轴并行(BroadPhaseBatchUpdateWorkTask mBatchUpdateTasks[3]) |
每个 Region 之间天然并行(Region::findOverlapsMT) |
| 适用场景 | 大量休眠物体、世界规模未知或动态扩张 | 大量同时运动物体、大型/规则世界、需要多线程扩展 |
2. SAP 算法实现剖析
2.1 数据结构
1 | |
mEndPointValues[axis]:长度2 * boxes + 2(前后各一个 sentinel),存放每个 AABB 的 min/max 端点编码值。mEndPointDatas[axis]:与值数组一一对应,低 1 bit 表示 isMax,高位是owner_box_id(见setData/getOwner/isMax)。mBoxEndPts[axis][box]:从 box ID 反查它在端点表中的 min/max 索引(SapBox1D::mMinMax[2]),用于 O(1) 取出某 box 在某轴上的位置。mListPrev/mListNext:以端点索引为节点的双向链表,被增量更新阶段用来"先逻辑挪动、再统一回写数组",避免 swap 时大量重复访存。BroadPhaseActivityPocket:一段连续被改动过的端点索引区间[mStartIndex, mEndIndex],用于把链表式 swap 的结果只在受影响的子区间内回写到mEndPointValues/Datas数组。SapPairManager(BpBroadPhaseSapAux.h):哈希表 + 状态位,使一次AddPair/RemovePair是 O(1),并能区分 "本帧新加 / 本帧删除 / 之前就存在"。
端点编码用了一个巧妙的 trick:min
编码后强制偶数(& ~1),max
强制奇数(| 1),这样在相等端点处的排序具有稳定的"max 排在
min 之后"语义(见
setMinSentinel、encodeMin/encodeMax)。
2.2 一帧的执行流程
入口:BroadPhaseSap::update(...),详细顺序:
1 | |
Task
链:SapUpdateWorkTask → SapPostUpdateWorkTask → continuation,前者内部串行调用:
1 | |
虽然这里写的是顺序 runInternal,但每个
BroadPhaseBatchUpdateWorkTask 是独立
Task,理论上可以并行(每个轴只读其他两个轴的
SapBox1D,写自己轴的端点表与自己 task 的 pair 数组),后续
postUpdate 把 3 个轴产生的 pair 合并。
Step
1:batchRemove(删除对象)
1 | |
要点:把要删除对象的端点先打 sentinel 标记
PX_REMOVED_BP_HANDLE,再做一次原地压缩;最后用 BitMap
一次性扫一遍 mPairs,把涉及到删除 box 的所有 pair
标记移除。
Step
2:batchUpdate(按轴并行批量更新)
batchUpdate 是 SAP
的核心。BroadPhaseSap::batchUpdate(axis, ...)
自适应分了两个分支:
1 | |
- 当
updated < 20%总数 →batchUpdateFewUpdates:先用 quicksort/bucket sort 收集"只处理被更新的端点"的索引mSortedUpdateElements,然后只对这些位置做反向冒泡。 - 否则 →
batchUpdate:从左到右扫描整条端点表,当某端点对应 box 在本帧被 update 或它正在与一个活跃 pocket 重叠时,走 swap 逻辑。
核心逻辑(节选):
1 | |
可以清楚看到 SAP 增量更新的灵魂: - min 向左越过某 max →
该轴上原本不重叠的两个 box,现在在该轴重叠了(潜在 add pair)。
- max 向左越过某 min → 该轴上原本重叠的两对
box,现在分开了(潜在 remove pair)。 - 仅"该轴重叠"并不代表 3D
重叠,因此还要调用 Intersect2D_Handle 在另外两个轴上做 2D
重叠测试,得到的才是真正的候选 pair。 - pair 用
(min(a,b), max(a,b))
标准化方向:mVolA>mVolB 表示 add,否则表示 remove(由
postUpdate 中的判断 if(volA > volB)
区分)。 - BroadPhaseActivityPocket +
mListPrev/mListNext 让链表式 swap 可以延迟到"pocket
结束时再回写",大幅降低了 swap 时的内存写量;最后 pocket
段内做 in-place 收缩。
Step
3:batchCreate(新增对象)
1 | |
新对象会触发一次"批量端点插入 + box
pruning"。performBoxPruning 又拆成
New-New(新创建之间)和 New-Old(新创建 vs
之前已有),都使用了 1D sweep 的经典写法(见
BpBroadPhaseSapAux.cpp 中的
performBoxPruningNewNew/NewOld)。
这也解释了官方注释中"large numbers of objects are added to or removed from the broad phase"会显著掉性能 —— 大批量创建意味着 3 个轴各做一次 radix sort + merge insertion + box pruning,比纯增量更新昂贵得多。
Step
4:postUpdate —— 把 3 个轴产生的"候选"合并为最终
add/remove
1 | |
最终通过 SapPairManager
的状态位(PAIR_INARRAY/PAIR_NEW/PAIR_REMOVED)一次性扫出
created/deleted pair 报告给上层。
2.3 复杂度
- 单帧增量更新(少量移动):单轴上的 swap 数与
endpoint 移动总距离 d成正比,整体接近 O(N + d + k),k 为新增 / 删除 pair 数,这就是 SAP 的"时间相干性"优势。 - 全员移动(最坏):单轴上每个端点的相对位置都可能改变,复杂度退化到 O(N²) 量级(每次 swap 都要做 2D 重叠测试)。
- 大批量插入:每轴 O((N + M) log M)(radix sort + merge insert),加上 box pruning。
3. MBP 算法实现剖析
3.1 数据结构
MBP 是分层结构:BroadPhaseMBP → MBP →
Region。
1 | |
- 每个
Region是一段"封装的 1D Sweep-Like" 小型 BP,内部维护自己的mStaticBoxes/mDynamicBoxes(按 minX 排序的 AABB 列表)。 - 一个对象可以同时归属多个 Region(
MBP_Object::mNbHandles记录归属数),这是 MBP 跨 Region 边界检测重叠的核心机制。 - 全局只共享一个
MBP_PairManager,所以同一对物体跨多个 Region 重叠也只会产生一条 pair(hash 表自动去重)。 mFullyInsideBitmap是优化:若一个对象完全落在它所归属的全部 Region 之内,那么新加 Region 时无需测试这个对象;新加 Region 时只遍历"不在 fully-inside 集合中"的对象(详见populateNewRegion的位扫描实现)。
Region 自身的关键字段:
1 | |
注意:MBP 把 dynamic 数组里"被更新"的对象通过
MTF(move-to-front) 移到前
mNbUpdatedBoxes 个位置(见 MTF()
函数),帧之间不需要 sort 静态/睡眠对象。
3.2 一帧的执行流程
入口:BroadPhaseMBP::update(...),同样基于 task:
1 | |
setUpdateData 在主线程内直接调用
removeObject / addObject / updateObject,并最后调用
mMBP->prepareOverlapsMT()(每个 Region 各自
staticSort + 后续每帧的 preparePruning
是在工作 task 内通过 findOverlapsMT 上下文里准备的)。
Step
1:apply
removed/created/updated(主线程,setUpdateData)
1 | |
MBP::addObject 会逐个 Region 测试新 AABB 与 region box
的相交,把 box 加入所有相交
region(region->addObject)。MBP::updateObject
同理,但有"上一帧只在一个 region 且该 region 不与别人 overlap、且新 box
仍完全在该 region 内"的快速路径,跳过遍历所有 region。
Step
2:每个 Region 静态排序 /
准备数据(prepareOverlapsMT)
1 | |
staticSort:分两段—— 已经在排好序的静态 box 视为"sorted set",新增/改动的静态 box 单独 radix sort,最后做双路合并排序写回。这样静态盒子绝大多数帧都只是 O(N) 合并,没有重排序。preparePruning:把"动态 box"分成 updated(前mNbUpdatedBoxes个,由 MTF 维护在数组头)和 sleeping(其余),各做一次 radix sort,得到mInput。prepareBIPPruning:构造 dynamic vs static 的 bipartite 输入mInput.mBIPInput。
Step 3:实际 box
pruning(findOverlapsMT)
入口:MBPUpdateWorkTask::runInternal → MBP::findOverlapsMT → Region::findOverlapsMT:
1 | |
doCompleteBoxPruning:经典的"主轴 sweep + 限制 max 范围扫描 + 2D 重叠测试"算法。MBP_OVERLAP_TEST在启用MBP_SIMD_OVERLAP时会扩展成一条 SSE 比较,可一次性完成 yz 的重叠检验(见BpBroadPhaseMBPCommon.h的SIMD_AABB布局:mMinX 与 mMaxX 相邻,便于 SSE 比较)。
1 | |
doBipartiteBoxPruning:dynamic ↔︎ static 之间的两向扫描,结构对称(先 dynamic 推 static,再 static 推 dynamic),尾部带MBP_USE_SENTINELS哨兵以省掉边界判断。TWO_AT_A_TIME宏让 bipartite 内部一次处理两个候选静态盒子,进一步利用指令级并行。
新生成的 pair 通过 MBP_PairManager::addPair 写入:
1 | |
注意:已存在的 pair 不会重复添加,只是
isUpdated = true;全新的 pair 才打
isNew = true。
Step
4:postUpdate → finalize
1 | |
MBP::finalize → MBP_PairManager::removeMarkedPairs
一次扫过 mActivePairs,根据: - isNew==true →
输出到 mCreated; -
isUpdated==false && (任意一端涉及 updated/removed)
→ 输出到 mDeleted 并物理移除该 pair; - 其余视为持续存在的
pair。
这也解释了 MBP 为什么"对全员同时运动也不会爆炸":它本质是每帧重算几何,时间相干性只用来快速识别 add/remove 报告,几何复杂度不被 swap 数主导。
3.3 复杂度
- 单 region 内:
Complete Box Pruning经典复杂度大约 O(N log N + K),K 为该 region 实际产生的候选对数;动态盒子较少的 region 几乎是 O(N)。 - 多 region:N 个对象、R 个 region,时间 ≈
sum_r (n_r log n_r)+ 区域间通过对象多归属自动覆盖。Region 之间天然并行(Region::findOverlapsMT)。 - 大批量插入:O(M) 次
addObject,每个对象只对 region 数(≤256)做相交测试,几乎与对象总数 N 无关。 - 全员移动:所有动态 box 都进 updated 集合,等价于做一次完整 box pruning,性能比 SAP 在同场景下稳定得多。
4. 关键算法子模块对比
| 子模块 | SAP | MBP |
|---|---|---|
| Pair 存储 | SapPairManager(开放寻址 hash +
Hash32Bits_1) |
MBP_PairManager(开放寻址 hash +
Ps::hash) |
| Pair 持久化 | 上一帧 pair 直接保留,本帧只增/减 swap 触发的差量 | 全部 pair 在 hash 表里跨帧持久存在,每帧打
isUpdated,未被刷新的判为 lost |
| 增量识别新对 | mVolA > mVolB 表 add,反之表 remove;最后由
ComputeCreatedDeletedPairsLists 汇总 |
addPair 返回时 isNew=true
表新建;removeMarkedPairs 集中处理 lost pair |
| 排序 | 增量保持有序 + 批量插入时 Cm::RadixSortBuffered |
每帧对 updated dynamic 做 RadixSort;static 用 incremental "排序-合并" |
| AABB 几何测试 | 1D:值比较;2D:Intersect2D_Handle
使用端点索引(依赖严格顺序)做无浮点比较 |
1D:mMinX<=limit sweep;2D:可选
SIMD(SIMD_OVERLAP_TEST),布局
mMinX/mMaxX/mMinY/mMinZ/mMaxY/mMaxZ 对 SSE 友好 |
| Group / 过滤 | BP_SAP_TEST_GROUP_ID_CREATEUPDATE
在内层循环就过滤同组 |
MBP_PairManager::addPair
入口处过滤同组(groups[object0]==groups[object1]) |
| 出界处理 | 没有"出界"概念 | 不与任何 region 相交的对象进入
mOutOfBoundsObjects,由上层报告 |
| Origin shift | BroadPhaseSap::shiftOrigin 逐端点
decode → shift → encode,并修正排序失效(testPostShiftOrder) |
MBP::shiftOrigin 直接对每个 region box 和每个 object
box 重新 encode;下一帧自然重新做 box pruning |
5. 并行化策略
5.1 SAP 的并行
SAP 把"按轴更新"封装为 3 个并行 Task:
1 | |
各 task 写自己的端点数组和 pair 缓冲;postUpdate
串行合并 3 个 pair 数组到
SapPairManager。并行度的上限只有 3。
5.2 MBP 的并行
MBP 的并行粒度是 region:每个 region 内部串行做 sweep,region
之间天然独立(互不写对方的数组)。MBP::findOverlapsMT
当前的实现是简单的 for 循环,但实际生产中通常把这层包成多个
task 并发分发(在 PhysX 3.4 的代码里直接顺序调用,是因为 region 数量上限
256,实际场景通常 16~64 个)。并行度的上限取决于 region
数。
这也是 MBP 在多核机器上比 SAP 更容易扩展的一个直接原因。
6. 内存对比
| 内存项 | SAP | MBP |
|---|---|---|
| 每个 box 的常驻数据 | 3 轴 × 1 个 SapBox1D(含 min/max 在端点表中的索引)+
每端点 ValType + BpHandle |
MBP_Object(含归属 region 列表)+ 每个所属 region 内
MBP_AABB + MBP_Index(6 × 32bit) |
| 排序/工作缓冲 | 3 个轴各自的端点表(2N + 2)+
mListNext/mListPrev 双向链表 +
mActivityPockets |
每个 region 内
mPosList、mTmpBuffers(sleeping/updated SoA)
+ mRS(基数排序) |
| 跨帧持久 pair | SapPairManager 的 hash 表 + 状态位字节 |
MBP_PairManager 的 hash 表 + MBP_Pair
数组(含 isNew/isUpdated) |
| 额外结构 | 无 region 概念 | mFullyInsideBitmap、mUpdatedObjects、mRemoved、mOutOfBoundsObjects、MAX_NB_MBP=256
个 region 桶 |
总体上: - SAP:内存几乎与对象数线性相关,没有 region/overlap 元数据; - MBP:内存比 SAP 略大(多了 region 桶、fully-inside 位图、跨 region 重复挂载等),但常数项可控(region 数 ≤ 256)。
7. 接口差异
7.1 SAP(不实现 region API)
1 | |
SAP 不重写
getNbRegions/addRegion/removeRegion,因为根本不需要。
7.2 MBP(额外实现 region API)
1 | |
并在 BroadPhaseMBP::getCaps 中明确声明
needsPredefinedBounds = true 与
maxNbRegions = 256:
1 | |
8. 适用场景与调优建议
| 场景 | 推荐 | 理由 |
|---|---|---|
| 大量物体绝大多数处于休眠 | SAP | 端点几乎不动,增量更新近 O(N) |
| 大型世界(无明显空间边界) | SAP | 无须 region;MBP 在无边界场景里只能划一个超大区域,退化为单 region 内部 box pruning |
| 大量同时移动的活动对象 | MBP | SAP 的 swap 数随活动数 × 平均移动距离爆炸增长 |
| 一帧内创建 / 销毁大量对象 | MBP | SAP 的 batchCreate 需要 3 个轴各做一次 RadixSort +
InsertEndPoints |
| 关卡可划分为规则块状区域(房间、街区、网格) | MBP | 用 PxBroadPhaseExt::createRegionsFromWorldBounds
一行代码生成;region 之间可并行 |
| 多核 CPU 上希望宽相位线性扩展 | MBP | 并行粒度 = region 数;SAP 的并行粒度恒为 3 |
| 角色控制器 / 大量动力学 ragdoll | MBP | 同上 |
| 不希望显式管理世界边界 | SAP | MBP 强制 needsPredefinedBounds=true |
| 内存紧张、世界稀疏 | SAP | 没有 region 桶 / fully-inside 位图等附加结构 |
8.1 SAP 使用建议
- 避免一次性
addActor巨量对象,分帧分批可以摊平batchCreate开销。 - 让物理 island
尽量休眠(
PxRigidDynamic::setSleepThreshold等),SAP 在休眠下接近免费。 - 若必须批量重建场景,可考虑切到 MBP。
8.2 MBP 使用建议
- Region 不宜过细(hash 冲突、跨 region 对象增多)也不宜过粗(单 region 内退化为整体 sweep)。官方注释提到的 4×4 区域是经验值。
- 让动态对象尽量只属于一个 region:跨 region 对象会被 每个 region 处理,多归属带来重复工作(但靠 hash 去重最终 pair 只有一条)。
- 借助
PxBroadPhaseExt::createRegionsFromWorldBounds快速生成均匀 region 网格;运行时可热插拔 region(addRegion/removeRegion)。 - 对象若长期落在 region 内部不出边界,会自动进入
mFullyInsideBitmap,新 region 加入时不会被重测,几乎零开销。
9. 总结
- SAP 适合"少量东西在动、世界规模不可预知"的场景;优点是无 region 配置、休眠效率极高,缺点是全员同时大量运动 / 大批量增删时复杂度恶化、可并行度只有 3。
- MBP 适合"大量东西同时动、世界规模和边界相对清晰、需要多核扩展"的场景;优点是每帧重算几何对运动量不敏感、region 间天然可并行,缺点是必须显式定义 region 且 region 划分的好坏直接影响性能与内存。
两者通过统一的 BroadPhase
接口(BroadPhase::create 工厂方法)暴露给上层
BpSimpleAABBManager,因此切换时业务代码只需要修改
PxSceneDesc::broadPhaseType 一处即可。